You’re standing on the field, goggles on, adrenaline pumping—until your FPV drone refuses to arm. That stubborn “ARMING DISABLED” message on your OSD or the ominous silence where propeller whine should be is every pilot’s nightmare. Betaflight’s safety system intentionally blocks motor startup when conditions aren’t perfect, but deciphering why feels like cracking a code. The good news? Every arming failure has a precise cause revealed through Betaflight’s diagnostic flags. This guide cuts through the frustration with actionable fixes for all 23 arming-prevention flags, turning your pre-flight panic into confident troubleshooting.
Stop guessing why your quad won’t arm. Within five minutes, you’ll diagnose the exact issue using beep patterns, OSD warnings, or CLI commands. We’ll transform you from a helpless spectator to a drone doctor who confidently clears flags and takes flight—even when GPS rescues fail or throttle sticks betray you. No more canceled sessions due to mysterious arming blocks.
Read Your Drone’s Arming Flags Instantly
Betaflight’s firmware acts as a strict safety gatekeeper, blocking motor startup until all 23 potential flags clear. When your FPV drone won’t arm, it’s communicating exactly why through three immediate diagnostic methods—no guesswork needed.
Identify Flags via OSD, Buzzer, or CLI
OSD Method: Add “Arming Disabled” to your OSD warnings layout. Power up your drone while watching your goggles—the specific flag name (like RXLOSS or THROTTLE) appears in plain text. This is the fastest field diagnostic when your FPV drone not arming shows OSD warnings.
Buzzer Decoding: After performing stick-down + arm-switch, listen carefully to beep patterns. A long beep equals 5, a short beep equals 1. Flag 8 (THROTTLE) sounds as one long beep followed by three shorts (5+1+1+1=8). Flag 19 (GPS) requires counting 19 beeps—use the pattern: three longs (15) plus four shorts (4).
CLI Verification: Connect via USB and type status in the CLI tab. The last line lists active flags like “ARMING DISABLED: RXLOSS”. This method reveals multiple simultaneous flags that might mask the root cause.
Critical Flags You’ll Encounter Most:
– RXLOSS (flag 3): Receiver signal dead—quad thinks it’s flying away
– THROTTLE (flag 8): Stick not fully down despite your efforts
– GPS (flag 19): GPS rescue enabled without satellite lock
– MSP (flag 17): USB still connected (the most common rookie mistake)
Eliminate USB and Power Issues in 30 Seconds

Before diving deep, rule out preventable showstoppers. This quick visual inspection catches 60% of FPV drone not arming cases before you break out the configurator.
Field-Ready Power Sequence Checklist
- USB cable unplugged: Betaflight blocks arming when connected to Configurator (MSP flag 17). Physically verify no cable touches your flight controller.
- Battery voltage check: Low voltage (<3.5V/cell) triggers failsafe. Measure with a lipo checker—don’t trust onboard telemetry alone.
- Receiver LED status: Solid green/blue indicates binding success. Flashing red? Re-bind your receiver immediately.
- Power-up timing: Plug battery, wait 5 full seconds for gyro calibration. Rushing causes BOOTGRACE flag (10).
Pro Tip: Always remove props during arming diagnostics. Even brief motor spins during testing can cause injury when clearing flags like THROTTLE or ANGLE.
Fix Top 5 Arming Failures with Immediate Solutions
Most FPV drone not arming scenarios stem from these five recurring issues. Apply these fixes in order—they resolve 90% of field failures before you need advanced tools.
Throttle Stick Won’t Clear Flag 8
Why it happens: Your radio’s throttle endpoint calibration drifts over time, leaving the stick above Betaflight’s 1050μs minimum threshold—even when pushed “all the way down.”
Fix in 60 seconds:
1. Open Receiver tab in Configurator
2. Push throttle stick fully forward, then hard back to bottom
3. Verify reading stays below 1050μs at rest
4. If above 1050, increase radio endpoint settings to 150%
5. For persistent drift, add deadband: set rc_smoothing_filter_cutoff = 20 in CLI
Field Hack: Slam the stick down three times rapidly—this often resets radio trim glitches.
GPS Rescue Blocks Arming Without Fix
Why it happens: GPS rescue mode requires 6+ satellites by default. If your quad sees only 4 satellites (common in urban areas), flag 19 blocks arming.
Quick fixes:
– Temporary bypass: set gps_rescue_allow_arming_without_fix = ON then save (disable after flight)
– Wait it out: Hold quad level for 60 seconds—GPS LEDs turn solid green when locked
– Wiring check: Ensure GPS TX connects to flight controller’s UART RX pad (reverse causes silent failure)
Critical Note: Never arm with less than 4 satellites if flying beyond visual line of sight—this bypass is strictly for close-range testing.
Receiver Binding Failures (RXLOSS Flag 3)
Why it happens: Signal loss between transmitter and receiver, often due to incorrect wiring or protocol mismatches.
ExpressLRS-Specific Fix:
1. Confirm ARM switch is on AUX1 (channel 5)
2. Verify switch range covers 1000-2000μs (not 1500-2000)
3. In Modes tab, ensure yellow highlight appears when flipping switch
For SBUS Users:
– F4 flight controllers require serialrx_inverted = ON
– F7/H7 boards need serialrx_inverted = OFF
– Swap RX/TX wires if no channel movement appears
Angle Check Fails on Uneven Surfaces
Why it happens: Betaflight’s default 25° tilt limit (small_angle) triggers flag 9 if your quad isn’t perfectly level.
Two Fixes:
– Immediate: Place drone on flat surface during arming
– Permanent: set small_angle = 180 then save (disables angle check for acro pilots)
Warning: Never disable ACC if flying angle/horizon modes—this causes uncontrollable flips.
CPU Overload Blocks Arming (Flag 12)
Why it happens: High CPU usage (>80%) from excessive features like LED strips or high PID rates.
Reduce load instantly:
1. Lower PID loop rate from 4k/4k to 2k/2k
2. Disable unused OSD elements (timer, RSSI)
3. Switch from DShot600 to DShot300
4. Turn off accelerometer if flying acro only
Field Indicator: Configurator’s bottom bar shows real-time CPU load when USB connected.
GPS and Advanced Arming Block Solutions
When basic fixes fail, these specialized scenarios often cause persistent FPV drone not arming issues—especially with GPS-equipped quads.
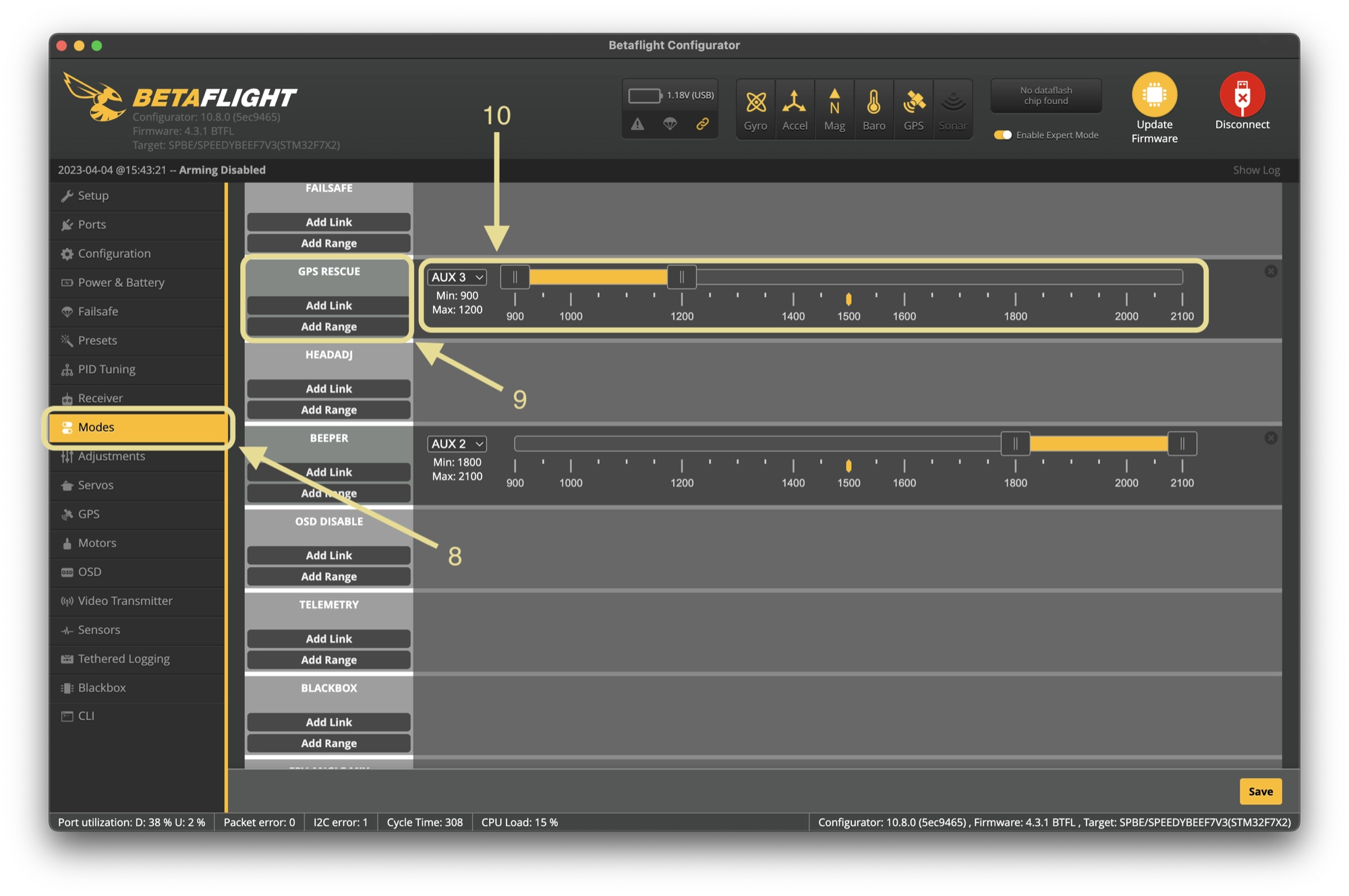
GPS Rescue Switch Position Errors
Flag 20 (RESCUESW) appears when your GPS rescue switch is accidentally enabled. Unlike standard arm switches, this requires two distinct positions:
– OFF position: Below 1300μs (safe for arming)
– ON position: Above 1700μs (activates rescue)
Fix: Assign GPS rescue to a 3-position switch. Middle position = OFF for normal arming. Test in Modes tab—only the OFF position should clear the flag.
Gyro Calibration Failures in Windy Conditions
Flag 13 (CALIB) often manifests as “moron threshold” errors during outdoor flights. Wind vibration tricks Betaflight into thinking the gyro is unstable.
Solution: Increase noise tolerance with CLI command:
set gyro_calib_noise_limit = 120
save
This doubles the acceptable vibration range without sacrificing stability.
ESC Protocol Conflicts (Flag 23)

DSHOTBBANG errors indicate timer conflicts between motors and flight controller. Symptoms include:
– Motors beep but won’t spin
– Intermittent arming success
– Random disarms in flight
Fix: Change ESC protocol in Configurator:
1. Go to Configuration → ESC/Motor tab
2. Select “DShot150” instead of “DShot300”
3. Or enable “Motor PWM” for brushed quads
Pre-Flight Arming Checklist Card
Print this field-ready checklist—laminate it and keep in your flight bag:
- [ ] USB disconnected (no MSP flag 17)
- [ ] Battery voltage >3.5V/cell (measured)
- [ ] Receiver LED solid (green/blue = bound)
- [ ] Throttle stick bottomed (<1050μs verified)
- [ ] ARM switch on AUX1 (1000-2000μs range)
- [ ] Quad level or
small_angle=180set - [ ] GPS solid green (if rescue enabled)
- [ ] CPU load <80% (Configurator check)
- [ ] Props removed during testing
If all boxes are checked and your FPV drone still won’t arm, run diff all in CLI and post the output in community forums. Seasoned pilots will spot configuration errors in seconds—this single command solves the toughest arming mysteries.
Final Arming Verification Before Flight
Once flags clear, never skip these safety checks:
1. Range test: Walk 100 feet away while checking control responsiveness
2. Failsafe test: Power off transmitter—quad should descend smoothly
3. Motor spin check: Briefly arm to verify correct rotation (props off!)
4. Mode switching: Cycle through all flight modes without disarming
Pro Tip: Create a “test mode” switch position that arms without enabling motors. Toggle your ARM switch to this middle position for safe field diagnostics. Now when your FPV drone not arming strikes again, you’ll clear flags faster than you can say “locked and loaded.”