Imagine five drones lifting off in unison, moving through the air like a flock of birds responding to each other’s movements in perfect harmony. This isn’t just for Hollywood movies anymore—learning how to make a drone swarm is now within reach of dedicated hobbyists and researchers. Whether you’re building for breathtaking light shows, precision mapping missions, or cutting-edge robotics research, creating a functional drone swarm combines drone building, programming, and engineering in one thrilling project.
The process of how to make a drone swarm requires careful attention to hardware synchronization, communication protocols, and formation algorithms. Forget expensive commercial systems—this guide walks you through building your own swarm from scratch using accessible components and open-source software. You’ll discover exactly which flight controllers deliver reliable swarm performance, how to implement the flocking algorithms that create natural-looking formations, and the step-by-step process to scale from one drone to a coordinated fleet.
Why Your Drone Swarm Needs Identical Hardware Configuration

Building a reliable drone swarm starts with ensuring every drone in your fleet has identical hardware specifications. Even minor variations in motor performance or sensor calibration can cause formation instability as drones struggle to maintain consistent positioning relative to each other.
Critical Components for Swarm-Ready Drones
Each drone in your swarm requires these essential components working in harmony:
- Pixhawk 4 flight controller running ArduPilot or PX4 firmware for precise low-level flight stabilization
- 2205-2306 kV brushless motors paired with 30-40A BLHeli_32 ESCs for consistent propulsion across all units
- 250-450mm carbon fiber frames with 5-7 inch propellers balancing agility and stability
- 3S or 4S LiPo batteries (1.3-2.2Ah, 75C discharge rate) providing 8-12 minutes of synchronized flight time
- Ublox M9N GPS modules delivering centimeter-level positioning accuracy critical for formation keeping
Pro Tip: Before assembling multiple drones, build and test one complete unit first. Verify all components work together flawlessly before replicating the build across your swarm. This saves hours of troubleshooting later when identical performance across all units becomes essential.
Communication Hardware That Makes Swarms Possible
Your drone swarm’s coordination depends entirely on reliable inter-drone communication. Choose from these proven options based on your budget and range requirements:
- XBee-PRO 900 HP modules offer 1km+ range at 200kbps—ideal for outdoor formations where distance matters
- ESP-Now protocol creates instant peer-to-peer Wi-Fi networks with 200m line-of-sight reach
- nRF24L01+ chips provide budget-friendly 100m range at ultra-low power consumption for indoor swarms
Critical Requirement: Implement GPS-based PPS (Pulse-Per-Second) synchronization across all drones. Without microsecond-level clock alignment, your swarm will experience timing drift that causes formation breakdown during extended flights.
Software Stack That Turns Individual Drones into a Cohesive Swarm

Building the hardware is only half the battle—your drone swarm needs the right software architecture to transform independent drones into a coordinated unit that responds as one.
Why ROS 2 Is Essential for Multi-Drone Coordination
Robot Operating System 2 (ROS 2) provides the critical foundation for swarm intelligence with its DDS-based discovery system that automatically detects and incorporates new drones into your formation. Unlike ROS 1, ROS 2 handles the complex networking required for multi-drone systems out of the box.
MAVROS bridges your flight controllers with ROS, translating MAVLink messages into accessible ROS topics that your swarm coordination algorithms can use. Configure each drone with a unique MAV_SYS_ID parameter and route telemetry through distinct UDP ports (14550, 14560, etc.) to keep data streams organized.
The Four-Layer Programming Approach for Swarm Control
Successful drone swarms use specialized programming languages at different system levels:
- Firmware level: C/C++ handles real-time flight control loops requiring microsecond precision
- Companion computer: Python 3 scripts manage high-level swarm logic and decision making
- Quick prototyping: Lua scripts in ArduPilot enable rapid parameter tweaks without full recompiles
- Ground control: JavaScript/TypeScript powers web-based interfaces for monitoring and control
Warning: Never attempt swarm flight without first validating your algorithms in simulation. Gazebo with ROS plugins creates virtual swarms where you can safely test formation logic before risking physical drones.
Step-by-Step Process to Create Your First Working Drone Swarm
Building a functional drone swarm requires methodical progression through four critical phases. Skipping steps leads to frustration and potential drone collisions.
Phase 1: Perfect Single Drone Flight Before Attempting Swarming
Before connecting multiple drones, master single-drone operations with these non-negotiable steps:
- Assemble and calibrate one complete quadcopter with all swarm-capable components
- Flash ArduPilot firmware and perform thorough ESC calibration
- Execute successful GPS waypoint missions with return-to-launch failsafes
- Verify stable position hold in varying wind conditions
Time Estimate: Allow 2-3 weeks to achieve rock-solid single-drone performance before adding swarm complexity.
Phase 2: Establish Reliable Two-Drone Communication
Once single-drone flight is mastered, progress to dual-drone coordination:
- Install identical communication modules on both drones (XBee in transparent mode works best)
- Verify bidirectional telemetry in QGroundControl—both drones must appear simultaneously
- Create a ROS node that publishes each drone’s position, battery level, and flight state
- Test basic position sharing where Drone 2 maintains fixed offset from Drone 1
Troubleshooting Tip: If communication drops during flight, check for 2.4GHz interference. Switching to 900MHz frequencies often resolves signal dropout issues.
Phase 3: Implement Reynolds’ Flocking Algorithms for Natural Movement
The magic of drone swarms comes from implementing these three fundamental rules in Python:
- Separation: Program drones to steer away from immediate neighbors (preventing collisions)
- Alignment: Code drones to match heading with nearby units (creating coordinated turns)
- Cohesion: Implement logic for drones to steer toward the group’s center point (maintaining formation)
Pro Tip: Tune these parameters in Gazebo first using a 10×10 meter virtual arena with 2-3 drones. Gradually increase complexity only after validating collision-free operation.
Phase 4: Scale to Five Drones with Advanced Coordination
With dual-drone communication working reliably, expand to a full swarm:
- Assign each drone a unique MAV_SYS_ID and static IP address
- Implement GPS-denied navigation using ORB-SLAM3 for indoor operations
- Add dynamic task allocation where drones bid for waypoints based on battery level
- Introduce formation reshaping capabilities (line to diamond, diamond to circle)
Critical Safety Step: Always establish a 50-meter safety perimeter with physical netting or geofenced boundaries during initial swarm tests.
Essential Safety Protocols for Drone Swarm Operations
Operating multiple drones simultaneously introduces unique safety concerns that demand strict protocols.
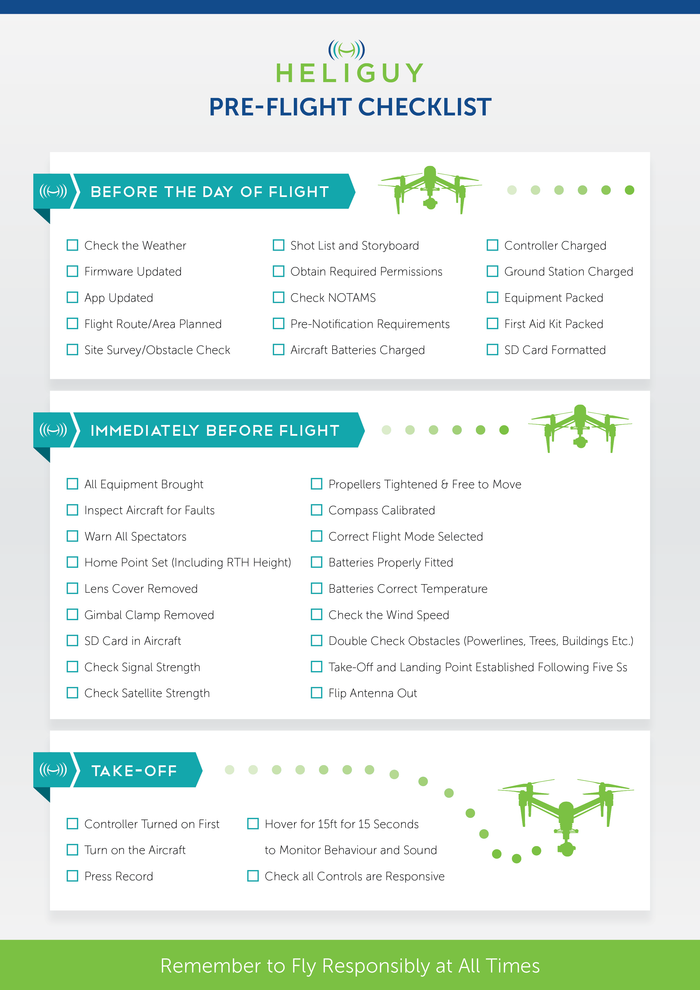
Mandatory Pre-Flight Swarm Checklist
Before every swarm flight, verify these critical items:
- Propeller tightness: Hand-tight plus 1/4 turn (loose props cause vibration-induced failures)
- Battery health: Internal resistance below 10mΩ per cell (prevents mid-air power loss)
- GPS quality: HDOP reading below 1.5 for adequate satellite lock
- Communication range: Test at 25% throttle before full mission execution
Legal Requirement: Most countries require remote pilot certificates, drone registration for units over 250g, and authorization for beyond visual line-of-sight operations. Check your local regulations before flying.
Troubleshooting Common Drone Swarm Problems
Even well-built swarms encounter issues. These solutions address the most frequent problems:
Swarm Divergence During Turns
Symptom: Drones drift apart when executing coordinated turns
Solution: Sync all units to the same GPS base station using RTK corrections for centimeter-level accuracy—this eliminates timing mismatches that cause formation breakdown
Unstable Formation in Wind Conditions
Symptom: Swarm loses cohesion when wind exceeds 10 mph
Solution: Increase position hold aggressiveness by 10-20% in flight controller parameters and enable fast-attitude control loops for quicker wind compensation
Communication Dropouts Between Drones
Symptom: Intermittent loss of drone connectivity during flight
Solution: Switch from crowded 2.4GHz frequencies to 900MHz radios or implement frequency-hopping spread spectrum protocols
Next Steps After Your First Successful Drone Swarm
Once you’ve achieved basic swarm flight with 5 drones, these advanced capabilities will take your system to the next level:
- Implement dynamic leader election where the closest drone to the objective automatically becomes formation leader
- Add computer vision for GPS-denied environments using Intel RealSense depth cameras
- Experiment with blockchain-based task assignment for truly decentralized decision making
Final Tip: Start small—two drones communicating successfully beats five drones colliding spectacularly. Build rock-solid communication before adding algorithmic complexity. Your foundation for creating impressive drone swarms is now complete, opening doors to light shows, search-and-rescue formations, and research applications that were previously only possible with expensive commercial systems.