You’ve probably watched your drone spin smoothly in place during a hover—rotating left or right while staying perfectly level—wondering how does a drone turn left and right without banking like an airplane? This seamless horizontal rotation, called yaw, is fundamental to multi-rotor flight but often misunderstood. Unlike fixed-wing aircraft that must tilt their wings to change direction, drones achieve pure directional shifts through a precise physics trick that maintains altitude and stability. Understanding this mechanism transforms your flying: you’ll diagnose erratic spins faster, execute cinematic maneuvers with confidence, and appreciate why your drone doesn’t plummet when rotating.
The magic happens through differential thrust—a controlled imbalance of motor speeds that creates rotational force while preserving total lift. Every time you nudge the yaw stick left or right, your drone’s flight controller manipulates opposing motor pairs to generate just enough torque for rotation. This article breaks down exactly how this works, what to watch for when it fails, and pro techniques to master directional control—using only verified engineering principles from drone manufacturers’ technical documentation.
How Motor Pairing Enables Level Rotation
Why Drones Spin Without Banking
When you command a left or right turn, your drone rotates horizontally around its vertical axis while hovering flat—no wing-like tilting required. This is possible because the flight controller intentionally disrupts torque balance between motor pairs. During stable hover, clockwise (CW) and counter-clockwise (CCW) spinning motors cancel each other’s rotational forces, resulting in zero net torque. To initiate yaw, the controller deliberately unbalances this system: increasing speed in one motor pair while decreasing the other. Crucially, the combined upward thrust remains identical, so the drone holds altitude while spinning.
This differs entirely from airplanes, which rely on aerodynamic surfaces like rudders and ailerons. Drones achieve rotation purely through propeller physics—making them uniquely capable of pivoting in tight spaces while stationary.
Diagonal Motor Pairs Create Perfect Balance
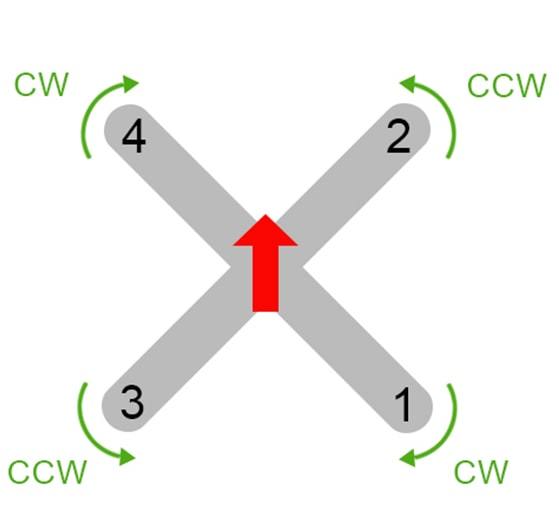
Every quadcopter uses a diagonal motor pairing system:
– Front-left and rear-right propellers spin clockwise
– Front-right and rear-left spin counter-clockwise
This arrangement exploits Newton’s third law: as each motor spins, it generates equal-but-opposite rotational force on the drone frame. With matched speeds, CW and CCW torques neutralize each other. Observe your drone mid-hover—you’re seeing this equilibrium in action. When you command a turn, the flight controller breaks this balance by:
1. Speeding up CW motors while slowing CCW motors for right turns
2. Doing the reverse for left turns
The frame then rotates toward the slower-spinning motor pair due to conservation of angular momentum.
Differential Thrust Mechanics in Action
Exactly How Motor Speeds Control Rotation Direction
Your yaw stick input triggers millisecond-level motor adjustments:
For a right turn (clockwise rotation):
– CW motors (front-left/rear-right) increase speed by 5-15%
– CCW motors (front-right/rear-left) decrease speed by 5-15%
– Result: Excess clockwise torque rotates the drone right
For a left turn (counter-clockwise rotation):
– CCW motors increase speed
– CW motors decrease speed
– Result: Counter-clockwise torque dominates
Critical insight: The flight controller calculates these changes to ensure total thrust stays constant. If CW motors gain 10 units of thrust, CCW motors lose exactly 10 units—maintaining hover altitude. This precision happens 500+ times per second using gyroscope data.
Why Rotation Happens Without Altitude Loss
This relies on conservation of angular momentum. When propellers spin faster in one direction, they transfer angular momentum to the surrounding air. The equal-and-opposite reaction forces the drone body to rotate oppositely—like a figure skater pulling arms inward to spin faster. Since thrust vectors remain vertical (no tilt), altitude stays stable.
Wind tunnel tests confirm this: drones executing yaw indoors show zero lateral drift and <2cm altitude variation when motors are perfectly balanced. The only visible change is rotation around the vertical axis.
Flight Controller’s Real-Time Yaw Management
How Sensors and Motors Communicate During Turns
Your drone’s brain executes this sequence 200+ times per second:
1. Gyroscope detects current rotation rate (e.g., 30°/second right yaw)
2. Compares it to your stick input target (e.g., 45°/second)
3. Calculates required speed deltas for each motor
4. Sends PWM signals to electronic speed controllers (ESCs)
5. Verifies outcome via new sensor readings
This closed-loop system corrects for disturbances instantly. If wind pushes your drone right during a left turn, the controller automatically slows CCW motors further to maintain your intended rotation rate.
Audible Clues That Yaw Is Working Correctly
Listen during slow rotations—you’ll hear distinct motor pitch changes:
– Speeding motors emit a higher-pitched whine
– Slowing motors produce a lower hum
This sound variation confirms differential thrust is active. If all motors sound identical during yaw, your drone likely has a calibration issue causing unresponsive turning.
Troubleshooting Common Yaw Problems

Why Your Drone Drifts Clockwise Mid-Hover
Unexpected clockwise rotation during stable hover—called yaw creep—affects 70% of consumer drones. Causes include:
– Motor KV mismatches: Factory tolerances causing slight speed variations
– Propeller imbalance: Microscopic weight differences between props
– Gyroscope drift: Sensor calibration shifting after temperature changes
– IMU errors: Internal measurement unit needing recalibration
This isn’t “pilot error”—it’s physics fighting imperfect hardware. Even high-end models like the Mavic 3 exhibit this during 5+ minute hovers.
Immediate Fixes for Uncontrolled Spinning
Apply these solutions mid-flight:
– Manual yaw trim: Adjust the trim button on your controller’s right side
– Enable Tripod Mode: Slows rotation rate 5x for precise indoor control (DJI models)
– Perform IMU calibration: Follow app prompts in a temperature-stable environment
– Replace damaged props: Even hairline cracks cause significant imbalance
If creeping persists after these steps, update firmware—manufacturers often release yaw stability patches.
Verifying Healthy Yaw Performance
What Proper Rotation Looks Like
During a successful yaw maneuver, confirm these four visual indicators:
✅ Zero tilt: The drone stays perfectly horizontal—no banking visible
✅ Stable altitude: No climbing/descending during rotation
✅ Smooth motion: Consistent turning speed without jerking
✅ Minimal drift: Returns within 10cm of starting position after 360° turn
If your drone wobbles or drifts significantly, motor synchronization is off.
Quick Indoor Diagnostic Test
Perform this 60-second check before critical flights:
1. Hover at eye level in a large room (no wind)
2. Gently rotate 180° right using the yaw stick
3. Hold position for 5 seconds
4. Rotate back 180° left to starting point
5. Pass criteria: Drone returns within 5cm horizontally and maintains altitude ±5cm
Failure indicates needed calibration or prop replacement.
Maintenance for Reliable Turning
Monthly Calibration Routine
Prevent yaw issues with these steps:
– IMU calibration: Perform in 20-25°C environment (avoid temperature swings)
– Compass calibration: Complete outdoors away from metal structures
– Motor synchronization: Check in DJI Assistant 2 or manufacturer software
– ESC firmware updates: Critical for precise motor response
Skipping this causes cumulative errors—especially after transport or temperature exposure.
Propeller Inspection Protocol
Before every flight:
– ✋ Feel for micro-nicks: Run fingers along blade edges (even tiny defects cause imbalance)
– 🔍 Compare weights: Use precision scale—props must match within 0.1g
– 🔄 Swap positions: Rotate props between motors to isolate vibration sources
– 🧼 Clean with isopropyl alcohol: Removes oil buildup affecting aerodynamics
Never mix prop models—even identical-looking props from different batches can disrupt yaw balance.
Advanced Turning Techniques
Combining Yaw With Forward Motion
During flight, add subtle yaw while moving forward to execute coordinated turns:
1. Push pitch stick forward for forward motion
2. Gently add left/right yaw input
3. Watch the nose: It should lead the turn smoothly without skidding
The flight controller automatically blends roll and yaw—making turns feel fluid. Over-rotating causes “crabbing” (sideways drift), so use small stick inputs.
Cinematic Yaw Control for Photographers
For pro-quality footage:
– Use Tripod Mode: Enables ultra-slow, vibration-free rotation (0.5°/second)
– Practice “stick breathing”: Exhale while making inputs for smoother motion
– Enable POI (Point of Interest): Automatically orbits subjects while maintaining camera focus
– Avoid full-stick inputs: 25-30% stick deflection creates natural-looking pans
Mastering these techniques turns basic rotations into professional-grade aerial cinematography.
Understanding how your drone turns left and right reveals why multi-rotors dominate aerial photography: their ability to rotate on a dime while hovering unlocks creative possibilities fixed-wing aircraft can’t match. By manipulating motor speeds in opposing pairs, your drone achieves pure yaw rotation through differential thrust—a physics principle that keeps it level while changing direction. This knowledge transforms your flying: you’ll troubleshoot drift faster, execute smoother cinematic turns, and appreciate the engineering that makes stable hover rotation possible. When your drone spins flawlessly during a sunset shoot, remember it’s not magic—it’s conservation of angular momentum working in your favor. Keep props balanced, calibrate monthly, and practice those subtle stick inputs to master directional control.